Abundance Perception ServiceQA, operators, and payouts.
Abundance is the first complete platform for collecting first-person, multimodal demonstration data. Our hardware and software work together as a single turnkey pipeline, capturing what your operators see and feel and delivering it as training-ready data.
Request a unit

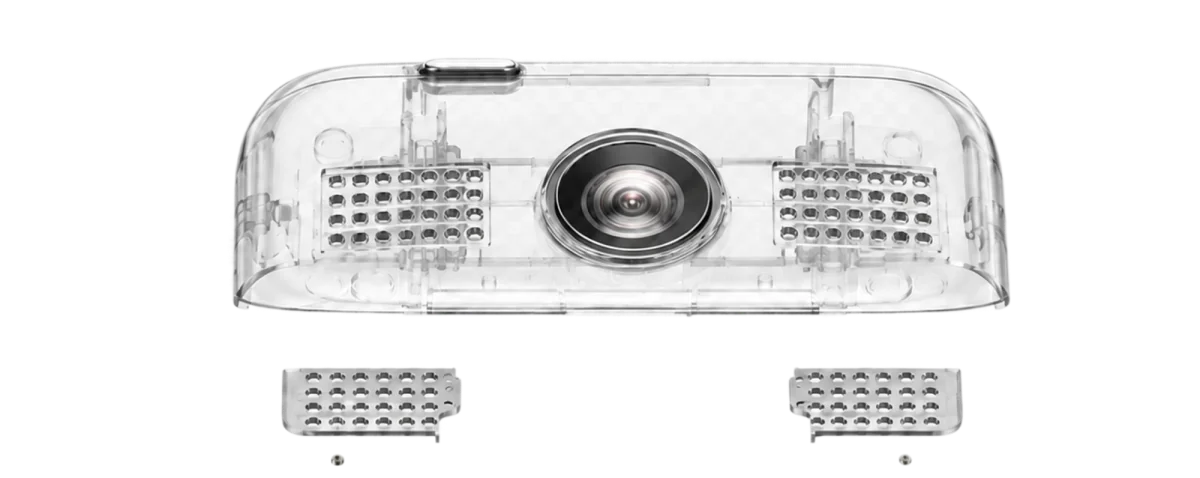
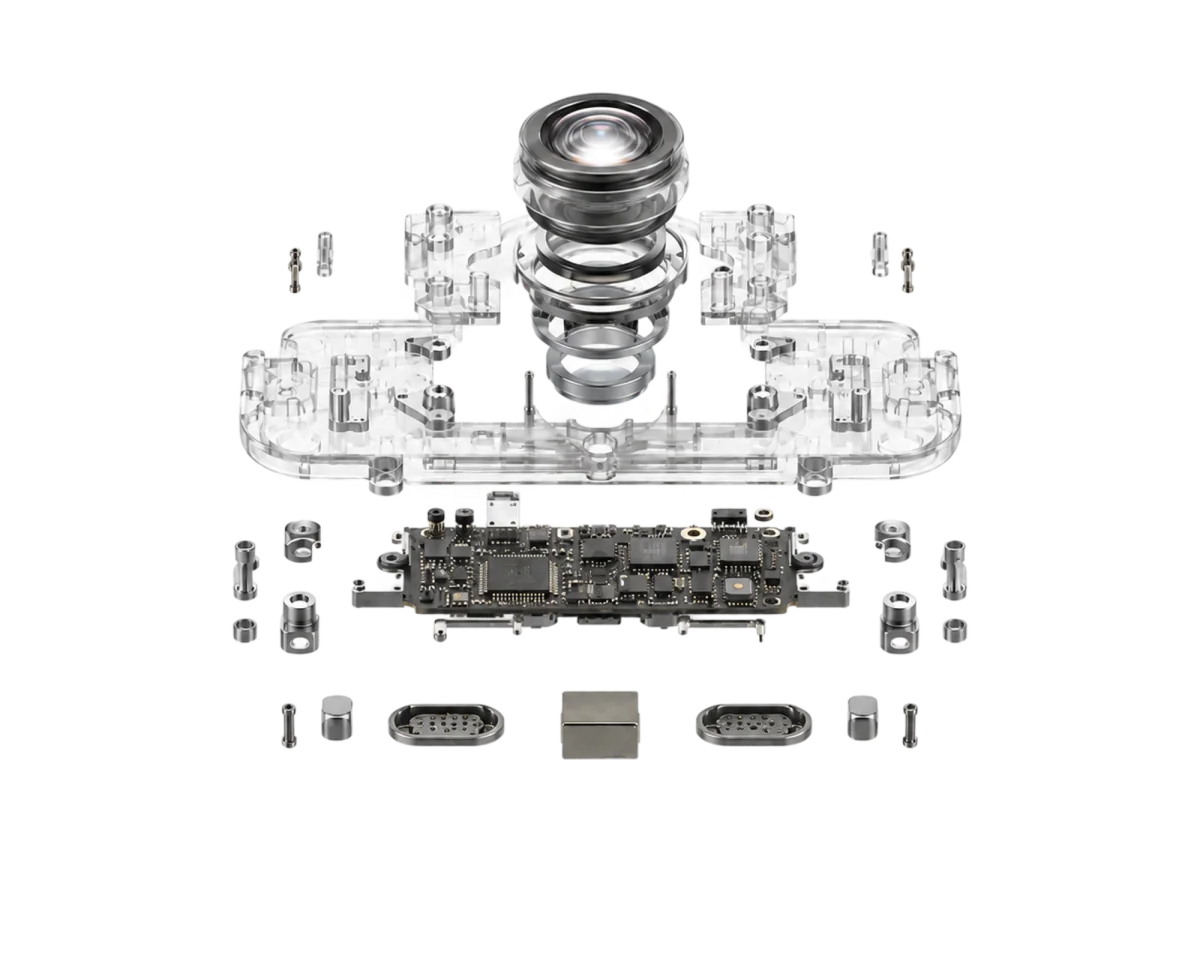
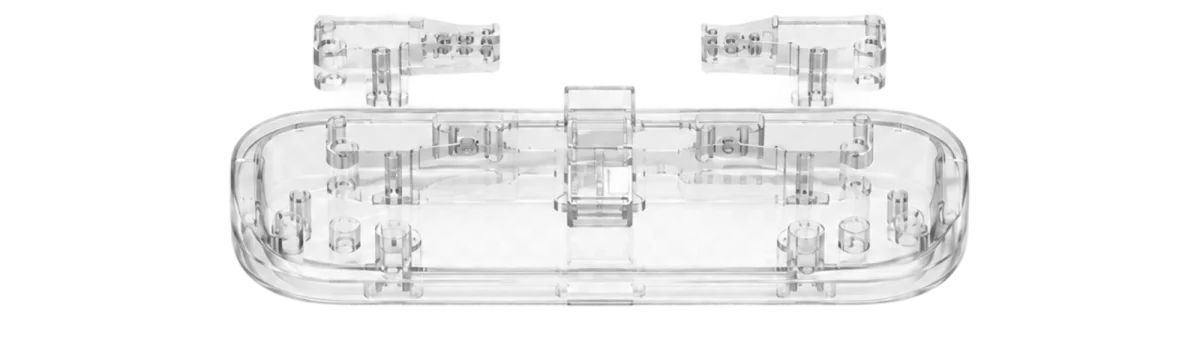
Worn the way your operators already work, the A3 captures first-person video while the A4 records the touch and force of every interaction. Together they capture each demonstration in full and in sync — light enough for a full shift and precise enough to train on.
No straps, no wire — the lightest config in the line. Light enough to forget.
Hardware, a contributor app, and the APS operations platform — one system that carries a session from the moment of capture to training-ready data.


Every chunk is scored for lighting, hands, and real work versus staged.
| Feature | A3Wireless VIO | A4Feedback + Vision |
|---|---|---|
| Sensor | Mono RGB · rolling shutter | Stereo RGB · global shutter |
| Resolution | 1920×1080 (2MP) | 1920×1080 (2MP) per eye |
| Frame rate | 30fps · constant | 30fps · constant |
| FOV (Diagonal) | 150° fisheye | 180° fisheye |
| Distortion | ~10% | ~15–20% |
| Color depth | 8-bit | 8-bit |
| Codec | H.264 · IPPP | H.264 · IPPP |
| Bitrate | 7 Mbps default · 4–20 Mbps | 4–20 Mbps configurable |
| IMU | 240Hz · 6-DoF | 240Hz · 6-DoF |
| Sensor sync | <1ms · IMU–video | <1ms · all sensors |
| Hand tracking | ~10mm | ~5mm |
| Tactile gloves | No | Per-fingertip force · 12-bit |
| Cameras | 1 · mono head | 6 · stereo + wrist + finger |
| Microphone | Yes · USB Audio Class | Yes · USB Audio Class |
| Connectivity | WiFi 2.4GHz P2P + USB-C | WiFi 2.4GHz P2P + USB-C |
| Battery | 8–10 hrs | 8–10 hrs |
| Storage | Onboard SD or phone | Onboard SD or phone |
| Weight (worn) | from 34g | ~200g* |
| Dimensions | 85 × 40 × 38 mm | — |
* Estimated, excluding battery pack.
Not a prototype. Abundance devices are capturing real demonstrations across the world right now.